
平地の歩きから不整地の不安定さを予測 -ウェアラブルセンサーと機械学習で解析-
PRESS RELEASE 2026.2.10
脳卒中者は,不整地を含む屋外の地域社会での歩行で安定性が低下し,転倒リスクが上昇します.ただし,脳卒中者の不整地での安定性に関する知見は不足しており,臨床的には平地歩行パラメータから予測できることは重要です.畿央大学大学院博士後期課程の乾 康浩 氏と森岡 周 教授らは,脳卒中者の不整地歩行に特徴的な安定性指標を腰部に取り付けたウェアラブルセンサーから特定し,さらにそれらを平地歩行パラメータから予測できるかについて機械学習を用いて検証しました.脳卒中者は不整地歩行中に,上下の動揺,前後の規則性,前後のリズムに課題を抱えることが明らかとなりました.また,平地歩行速度0.8m/s未満になると不整地での上下の動揺が大きく,平地歩行での足関節の動きが不整地歩行での前後の規則性に影響を与え,平地歩行でのリズムが不整地歩行でのリズムに影響を与えることが示されました.この研究成果はScientific Reports誌(Identifying and predicting gait stability metrics in people with stroke in uneven-surface walking using machine learning)に掲載されています.
本研究のポイント
■腰部に取り付けたウェアラブルセンサーから脳卒中者の不整地歩行に特徴的な安定性指標を抽出した.
■脳卒中者は,健常者と比較して不整地歩行で上下の動揺の増加,前後の不規則性の増加,前後のリズムの低下を示すことが明らかとなった.
■平地歩行速度0.8m/s未満になると不整地歩行での上下の動揺が大きく,平地歩行での足関節の動きが不整地歩行での前後の不規則性に影響を与え,平地歩行でのリズムが不整地歩行でのリズムに影響を与えることが示された.
研究概要
脳卒中者は,不整地を含む屋外の地域社会での歩行で安定性が低下し,転倒リスクが上昇します.ただし,脳卒中者の不整地での安定性に関する知見は不足しており,臨床的には平地歩行パラメータから予測できることは重要です.畿央大学大学院博士後期課程の乾 康浩 氏と森岡 周 教授らの研究チームは,自作の予測困難な摂動が生じる不整地路を用いて脳卒中者の不整地歩行に特徴的な安定性指標を腰部に取り付けたウェアラブルセンサーから特定し,さらにそれらを平地歩行パラメータから予測できるかについて機械学習を用いて検証しました.脳卒中者は不整地歩行中に,上下の動揺,前後の規則性,前後のリズムに課題を抱えることが明らかとなり,平地歩行速度0.8m/s未満になると不整地での上下の動揺が大きく,平地歩行での足関節の動きが不整地歩行での前後の規則性に影響を与え,平地歩行でのリズムが不整地歩行でのリズムに影響を与えることが示されました.本研究は,脳卒中者の不整地歩行に特徴的な安定性指標を特定し,平地歩行パラメータから予測した初めての研究です.
研究内容
脳卒中者は,不整地を含む屋外の地域社会での歩行で安定性が低下し,転倒リスクが上昇します.ただし,脳卒中者の不整地での安定性に関する知見は不足しており,臨床的には平地歩行パラメータから予測できることは重要です.
本研究では,腰部にウェアラブルセンサーを装着して自作の不整地路を歩行し(図1),得られた加速度データから線形・非線形指標19項目を算出した.これらの指標を入力として複数の機械学習分類モデルを構築し,脳卒中者と健常者の分類を行った.さらに,SHAP(SHapley Additive ExPlanations)分析により,分類に寄与する指標を特定した.さらに特定された安定性指標を平地歩行パラメータか予測できるかについて機械学習回帰モデルを用いて検証しました.
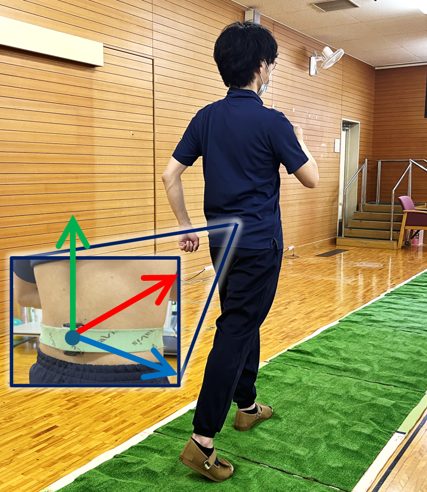
図1.不整地路とウェアラブルセンサー
機会学習分類モデルの結果からは,複数のモデルで95%以上の識別精度があり(図2),SHAP分析の結果,脳卒中者は不整地歩行中に,垂直方向の動揺を示すRoot Mean Squareの高さ,前後の不規則性を示すSample Entropyの高さ,前後のリズムを示すHarmonic Ratioの低さの寄与度が高いことが明らかとなりました(図3).
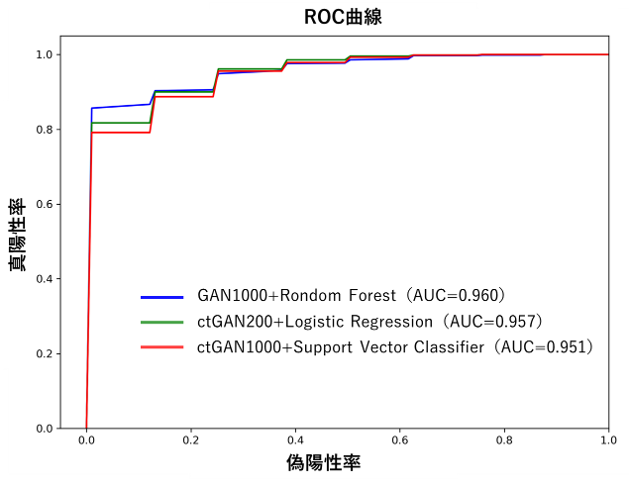
図2.不整地歩行における脳卒中者と健常者の分類性能(ROC曲線)
GAN1000: Generative Adversarial Network(GAN)を用いてデータ数を 1000 に拡張したモデル; ctGAN200: Conditional Tabular GANを用いてデータ数を200に拡張したモデル;
ctGAN1000: Conditional Tabular GANを用いてデータ数を10000に拡張したモデル.
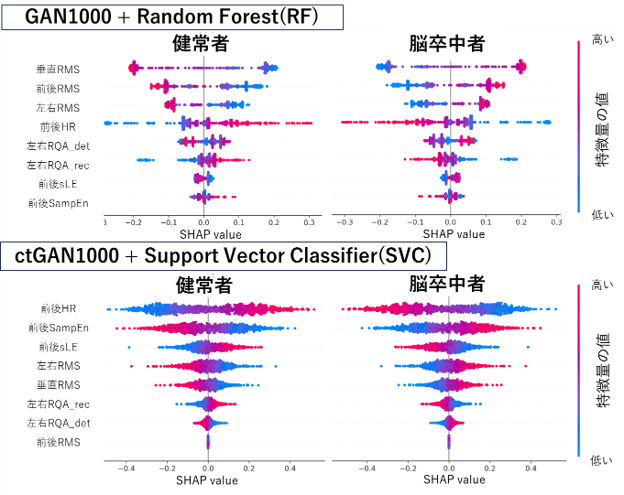
図3.機械学習分類モデルにおける特徴量の寄与(SHAP分析)
各安定性指標が脳卒中者と健常者の分類にどれだけ貢献しているかを示すSHAP値をプロットしており,横軸がSHAP value(寄与度)を表してます.
また,機械学習回帰モデルの結果からは,平地歩行速度0.8m/s未満になると不整地歩行での垂直方向のRoot Mean Squareが大きく,平地歩行での足関節の動きが不整地歩行での前後のSample Entropyに影響を与え,平地歩行でのHarmonic Ratioが不整地歩行でのHarmonic Ratioに影響を与えることが示されました(図4).
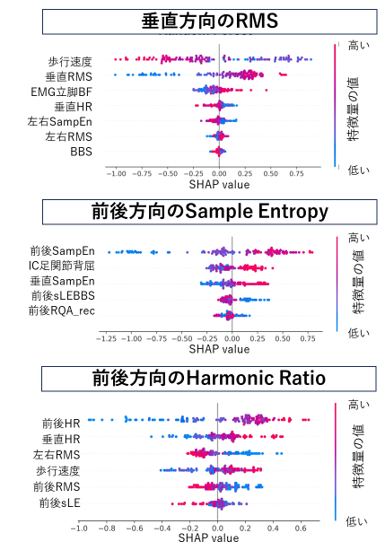
図4.機械学習回帰モデルにおける特徴量の寄与(SHAP分析)
不整地歩行における各安定性指標の予測に対して平地歩行パラメータがどれだけ貢献しているかを示すSHAP値をプロットしており,横軸がSHAP value(寄与度)を表してます.RMS: Root Mean Square; EMG: Electromyography; BF: Biceps Femoris; HR: Harmonic Ratio; SampEn: Sample Entropy; BBS: Berg Balance Scale: IC: Initial Contact; RQA: Recurrence Quantification Analysis; sLE: short-time Lyapunov Exponent
研究グループは,これらの結果から,機械学習を用いて, ウェアラブルセンサーの計測結果から不整地歩行の安定性を多面的に評価できる可能性を示唆しています.また,平地歩行パラメータから不整地歩行での安定性を予測できる可能性があることは,屋外歩行獲得に向けた個別化されたリハビリテーションの開発に貢献すると考察しています.
本研究の臨床的意義および今後の展開
本研究成果は,予測困難な摂動が生じる不整地を歩く際の脳卒中者の安定性低下について,健常者との違いを明らかにしており,リハビリテーション専門家が屋外歩行での安定性を捉える際に着目すべき点を示しています.さらに,不整地を安定して歩行するための平地歩行パラメータを明らかにしたことで,屋外歩行獲得のための個別化支援に貢献します.今後は,より高精度なモデルの構築や縦断研究へと発展する必要があります.
論文情報
Yasuhiro Inui, Yusaku Takamura, Yuki Nishi, Shu Morioka
Scientific Reports. 2026
・関連する先行研究
問い合わせ先
畿央大学ニューロリハビリテーション研究センター
博士後期課程 乾 康浩
教授 森岡 周
Tel: 0745-54-1601
Fax: 0745-54-1600
E-mail: s.morioka@kio.ac.jp